

建机/农机
实现利用CAN·影像网桥的智能农机
智能工程机械·农业机械的市场潜力
在除了依靠人力的情况下别无选择的市场中,需要利用网络技术的新型产品。
在需要应对人口老龄化的危险建筑工地·农业工地中,需要智能建筑机械·农业机械来尽可能少地依靠人工来进行工作。
为了实现全自动驾驶,仍然有许多技术障碍需要解决,但是在达到这一点的过程中,已经提出了过渡解决方案来协助这项工作。
技术挑战和Silex解决方案
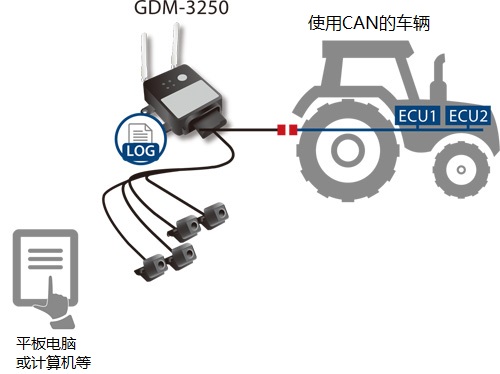
支持视频 串口·CAN/无线局域网网桥 GDM-3250
在农业领域,随着今后农民的老龄化、从业人员减少、针对农地大规模化的效率化?省力化应对正在成为亟待解决的课题。对于这些课题,各大农业机械制造商正在推广的传感器、摄像头等IoT设备或移动终端、通信、GPS等各种IT基础设施的智能型农业用机器人拖拉机的开发、销售都已经开始※。
※ 截止到2018年12月
工业机械的自动驾驶分为农林产业省设定的1级(操作员搭乘在农机上)、2级(在操作员监控下无人驾驶)、3级(完全无人驾驶),目前各公司提供的机器人拖拉机都是实现了2级无人驾驶的产品。这一级别的无人驾驶需要使用者时刻监控拖拉机的行驶信息,在必要时手动介入,因此必须实现平板电脑等移动终端与车辆共享无线通信和行驶信息。
除了车辆控制用的CAN通信的收发外,Silex的GDM-3250还可同时无线传输车载摄像头拍摄的行驶影像,还标配室外车辆所必须的防尘·防水·耐温度等环境性,可大大有助于缩短智能型农业机械的开发周期。
车辆行驶信息=CAN数据的无线化
拖拉机的行驶控制·运行传感器信息交换采用的是CAN(Controller Area Network)通信。GDM-3250可以将这一CAN通信信息转换为IP通信信息进行无线传输。
要实现机器人拖拉机,需要通过平板电脑远程监控、控制该CAN信息。Silex的CAN·无线网桥标配支持智能转换数据体积和通信机制不同的CAN与IP通信的功能,因此可直接利用※1车辆端现有的CAN通信及ECU(Electronic Control Unit)。※1车辆端现有的CAN通信及ECU(Electronic Control Unit)。
※1 无线通信中断时的安全控制通过车辆端进行应对、实现。

车载摄像头拍摄的行驶影像的无线传输
要“由人”随时监控机器人拖拉机的行驶信息,仅仅依靠车辆行驶数据和传感器信息是不够的。利用拖拉机上搭载的多个车载摄像头传输周边影像,结合车辆运行传感器信息进行实时监控,可以实现远程操作。
GDM-3250最多可连接4台常规的车载摄像头(NTSC),还可将多个车载摄像头影像合并成1个进行传输。这样一来可以高效地使用无线带宽,还能减轻移动终端应用的影像处理负荷。

支持室外使用的硬件
除了常规的办公场所、工厂环境,与一般的乘用车相比,农机车辆要求更高的耐环境性能。
安装在驾驶席(驾驶舱)内时,车身会成为干扰无线通信的障碍物并导致通信距离缩短,因此建议尽可能将无线装置安装在驾驶舱的顶棚上※2。GDM-3250具备IP67级的防尘、防水性。还实现了-30℃~65℃的工作温度。搭载在顶棚上时,可以实现与移动终端之间更稳定的无线通信。
※2 可以只延长安装无线天线,但有时可能会导致无线信号衰减。

平板电脑应用的提供
机器人拖拉机是通过多种技术、设备的组合实现的,但是对农业作业人员而言,“车辆监控、操作终端应用”是其中最重要的内容之一。该应用需要以各农机制造商的机器人拖拉机特有的功能为基础,进行个别开发。
Silex还承接此类平板电脑应用的开发委托,为了让各农机制造商能够执行开发,Silex在提供CAN·影像应用开发用SDK时,还会配套提供样本程序代码。运用我们所提供的上述代码和工具,农机制造商就可以自行进行拖拉机及周边装置的开发了。

海外应对
机器人拖拉机的需求不仅仅局限于日本国内,以美国为首,农业规模更大、更集中的海外各国同样存在这方面的需求。
除了无线局域网终端的开发、制造,Silex还提供上述海外国家代理、获取无线认证等业务支持。配合机器人拖拉机的海外展开,作为一款国内外可通用的CAN·影像网桥用终端,您尽可放心使用。
首先可以节省工程机械和农业机械的劳动力。其次也是对自动驾驶的挑战。
通过工程机械和农业机械的产品开发,Silex能够了解专用车辆所需的通信设备要求,并积累了满足这些要求的专门知识。一个示例是CAN数据和图像数据的处理。
基于目前积累的专业知识,我们正在进行融合5G,图像传输技术和控制技术的通信技术,并准备为自动驾驶时代的到来做出贡献。

